

Foire aux Questions – Instruments
Je viens d'installer un GPS HF et maintenant j'ai un message "Collision bus", que dois-je faire ?
Avant d’installer ce GPS vous aviez sans doute un GPS standard connecté sur une entrée NMEA de votre système. Cette entrée NMEA a été initialisée et les canaux GPS créés. Le GPS HF crée aussi des canaux GPS sur le bus d’où la collision et le message d’erreur.
Solution :
- Déconnectez le GPS HF et le GPS standard.
- Mettez le système sous tension et initialisez à nouveau l’entrée NMEA où était connecté le GPS standard. Le résultat doit être “O canaux créés”. Cela a donc pour effet de vider cette entrée NMEA.
- Coupez l’alimentation puis rebranchez le GPS HF et le GPS standard.
- Mettez à nouveau le système sous tension puis engagez une route vers un waypoint. Faites alors une initialisation NMEA. Cela aura pour effet de créer les canaux GPS qui ne sont pas fournis par le GPS HF comme l’écart de route ou le cap et la distance au waypoint.
J'ai perdu mon code de vent réel et vitesse fond, comment faire ?
Ce code est calculé avec le numéro de série de votre calculateur de pilote (Gyropilot 2). Nous maintenons une base de donnée des codes délivrés, vous pouvez donc nous le demander par e-mail.
Le numéro de série est composé de 4 caractères hexadécimaux (donc de 0(zéro) à F). Vous pouvez le retrouver sur une étiquette collée sur le calculateur (voir image plus bas) ou via le menu de votre commande pilote.
- Cas du Gyropilot Graphic : Menu principal > Configuration > Code propriétaire > Options.
- Cas du Multigraphic : Menu principal > Pilote > Option vent réel > Code vent réel.

Le numéro de série ici est le 0EAF
Mon récepteur ou transpondeur AIS est bien connecté à mon Multigraphic mais je ne vois pas la pages AIS. Comment faire ?
Vous pouvez dans un premier temps vérifier que les données AIS entrent bien sur le Multigraphic via la console : Menu principal > Paramètres > Maintenance > Périphériques > Console. Vous devez voir des phrases qui ressemblent à :
!AIVDM,1,1,,A,14eG;o@034o8sd<L9i:a;WF>062D,0*7D !AIVDO,1,1,,B,13PRrB0000OvbS@NhA9=oPbr0<0u,0*5
Si ce n’est pas le cas vous devez vérifier votre installation physique.
Si vous voyez ces phrases il faut activer la page AIS de votre Multigraphic : Menu principal > Ecrans, puis sélectionnez un écran personnalisable libre. Choisissez le “Type d’écran”, faites défiler vers le bas jusqu”à “AIS”. Sélectionnez “visible” pour obtenir une coche verte au lieu d’une croix rouge. La page est alors disponible. Il vous faudra aussi avoir un compas et des données GPS sur le bus.
Je viens d'installer une Box WiFi (ou Box USB) mais je ne parviens pas à faire remonter des informations NMEA. Que se passe-t-il ?
Sur une Box WiFi ou Box USB l’initialisation se fait à l’aide d’un bouton capacitif. Vous laissez le doigt sur ce bouton pendant 3 secondes* (3 bips) pendant que le dispositif chargé d’envoyer les données NMEA (traceur, GPS, PC, tablette ou mobile) émet effectivement des données. L’entrée NMEA (WiFi (UDP 50000), USB ou RS232 (4800 à 38400 bauds)) se met alors à scruter pendant 20 secondes les données reçues. Si ces données correspondent à un canal disponible sur le bus, le canal est créé et la Box WiFi ou USB pourra diffuser ces données. A la fin de la procédure 1 bip par canal créé est émis (tendez l’oreille!). Si la procédure échoue, vérifiez que les données que vous souhaitez voir remonter ne sont pas déjà créées sur une autre entrée NMEA, auquel cas le canal n’est donc pas disponible.

*d’autres possibilités d’initialisation existent, reportez-vous à la notice.
Qu'est-ce que l'option "vent réel / vitesse fond" ?
Calcul du vent réel
Le calcul du vent réel est basé 3 données mesurées : vitesse surface (Vb), vitesse (Va) et angle (Aa) du vent apparent.
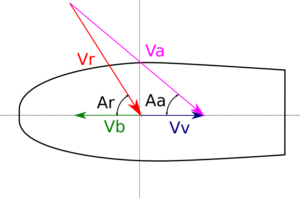
Vitesse du vent réel : Vr = (Va2 + Vb2 – 2 Va Vb cos Aa)½
Angle du vent reel : Ar = Aa + arcsin(Vb sin Aa / Vr)
Référence vitesse surface
De multiple raisons peuvent empêcher une bonne mesure de vitesse surface :
- Le capteur (loch/speedo) peut être sale. C’est souvent le cas des capteurs à roue à aube que l’on laisse en place. Il faudrait le sortir de son passe-coque lorsque l’on ne navigue pas. Mais cette gymnastique est fastidieuse.
- Un bateau ne navigue pas sur son axe (dérive), et la carène dévie les filets d’eau. Ces déviations évoluent en fonction de la gîte. La carène crée aussi une couche perturbée dite « couche limite » où l’eau est freinée par le frottement sur la surface de la coque. Selon le niveau d’équipement électronique on peut calibrer le capteur avec un simple coefficient ou une table complète qui fait intervenir l’amure et la gîte. Une mesure ultrason (Ultrasonic Speedo) permet d’aller mesurer à l’extérieur de la couche limite et retire donc un biais.
- Certains bateaux à déplacement léger voient une partie de leur coque sortir de l’eau au planning. Il est difficile alors de trouver une zone de la coque qui sera toujours dans l’eau. La plupart du temps le loch/speedo est installé en avant de la quille. Il n’est pas rare de voir cette zone sortir de l’eau en cas de planning, le capteur devenant inopérant. Il est alors possible d’installer 2 capteurs latéraux dans le tiers arrière du bateau. Un sélecteur automatique de capteur se chargera de basculer d’un capteur à l’autre selon l’amure.

©Th.Martinez/Sea&Co. LA TRINITE SUR MER – – FRANCE 20 mai 2014. Départ de la course en solitaire La MINI en Mai, organisé par la SNT. MONOHULL, MONOCOQUE, MINI EN MAI, 865, CULTISOL, Davy Beaudart
La vitesse fond n’est pas sujette à ces perturbations et nous offre donc une source plus robuste. Quand il s’agit de naviguer sous pilote en mode vent réel cette robustesse de source de vitesse devient primordiale. Si la vitesse du bateau (Vb) tombe à 0 nœuds l’angle du vent réel (Ar) est égal à l’angle du vent apparent (Aa). Imaginons la situation suivante :
- Angle du vent apparent 140°
- Vitesse du vent apparent 12 nœuds
- Vitesse du bateau 15 nœuds
Le vent réel calculé est donc d’environ 25 nœuds pour un angle de 160°. Si la vitesse tombe à 0 le nouvel angle de vent réel sera de 140° (égal au vent apparent) et le pilote va tirer la barre pour rejoindre la consigne de départ (160°), soit 20° d’abattée. Le bateau ralenti et l’angle du vent apparent augmente, le pilote alors repousse la barre pour lofer. Cela devient un peu chaotique.
Les polaires d’un bateau sont établies sur une référence de vitesse surface, ce calcul basé sur la vitesse fond est donc utile pour le pilote mais pas pour la mesure de performance. En croisière c’est aussi une référence de vitesse tout à fait intéressante.
Référence vitesse fond (SOG – Speed Over Ground)
Comment obtenir un calcul de vent réel basé sur la vitesse fond quand on est équipé d’instruments nke ? Il faut remplacer la vitesse surface par la vitesse fond sur le bus. C’est l’interface loch/sondeur (ILS) qui fournit cette vitesse surface. Lorsque l’on dispose d’une ILS en version 2.1 modifiée, si l’on sélectionne « référence vitesse : fond » dans le paramétrage du pilote, l’ILS se charge d’alimenter le canal vitesse surface avec la vitesse fond qu’elle reçoit via le bus.
Pour vérifier que cela fonctionne il existe une procédure simple que l’on peut réaliser au ponton :
- Régler le filtre de la vitesse surface à 1. Cela permet de lire la donnée brute sans retard.
- Sélectionner les canaux vitesse surface et vitesse fond sur un afficheur. Même à l’arrêt on observe toujours une vitesse fond différente de 0.
- Si vous avez sélectionné la vitesse surface comme référence dans le pilote vous devez lire une vitesse surface différente de la vitesse fond.
- Si vous avez sélectionné la vitesse fond comme référence dans le pilote vous devez lire des données identiques sur les 2 canaux avec un éventuel décalage temporel minime.

Mise en garde
Calculer un angle de vent réel à partir d’une vitesse fond nécessite une source réactive, haute fréquence et faible latence. Le capteur le plus adapté est donc le GPS HF nke.
Comment changer les piles de ma télécommande (mon émetteur) ?
Afin de garantir l’étanchéité de nos émetteurs les boitiers sont collés, il est impossible de les ouvrir sans les détruire. Nous réalisons donc ce changement de boitier et pile dans nos ateliers. Il vous faut nous l’envoyer accompagné d’un courrier comportant toutes les coordonnées nécessaires pour vous contacter (e-mail, adresse postale de retour, téléphone). Le délai ne dépasse pas la semaine transport compris pour la France métropolitaine.
L’adresse d’expédition est :
nke Marine Electronics
6 rue Gutenberg
56700 HENNEBONT – France
Tel.: +33 297 36 10 12
e-mail: info.marine-electronics[arobase]nke.fr
Quelle est la fréquence de changement de pile ?
Cela dépend de votre usage et aucun témoin ne permet de connaitre le niveau de charge de votre pile. En usage intense il faut compter 3 ans d’autonomie, en usage normal cela peut aller jusqu’à 10 ans. L’activation de la surveillance MOB consomme un peu plus que l’usage simple de télécommande. L’émetteur ne consomme pas en-dehors des appuis touche ou de la surveillance MOB, on observe une très faible autodécharge de la pile.
En cas d’événement particulier comme la traversée d’un océan ou une grande croisière il est conseillé de procéder à un changement de pile si l’émetteur à plus de 3 ans. Ce serait dommage qu’il tombe en panne durant cet événement.
Foire aux Questions – Logiciel TopSailor
TopSailor reste bloqué sur la page d'accueil

Solution :
- Vérifiez votre connexion Internet
- Si vous utilisez un proxy, vérifiez qu’il arrive à communiquer avec les serveurs nke (nke-marine-electronics.fr & compte.nke-marine-electronics.fr)
- Essayez de relancer TopSailor en vous connectant à un autre réseau
- Relancez TopSailor sans être connecté à un réseau
TopSailor ne se connecte pas à ma box nke

Solution :
- Cliquez sur le bouton “Se connecter”
- Double-cliquez sur le nom de la box
L'erreur datavars.dat apparait même en étant connecté à Internet

Solution :
- Ouvrez l’éditeur de registre et allez à l’emplacement Ordinateur\HKEY_CURRENT_USER\SOFTWARE\nke\Common. Remplacez la valeur de la variable Databasepath par C:\ProgramData\nke\Database
L'identification des instruments ne se termine jamais

Solution :
- Allez dans l’onglet Paramètres –> Connexion et cliquer sur le bouton Se déconnecter. Relancez la détection et reconnectez-vous à votre box.
